03. Introduction
Nd787 C4 L2 A02 Introduction V1
We can group a drone's 12 state variables into 4 buckets.
- 3D position: x,y,z
- 3D translational velocity: \dot{x},\dot{y},\dot{z}
- 3D orientation: \phi, \theta, \psi
- 3D rotational velocity: p,q,r
Different sensors tend to be useful for measuring different quantities. Try to answer the following questions about which state variables each sensor is most useful for measuring.
SOLUTION:
- Orientation
- Rotational velocity
SOLUTION:
- Position
- Translational velocity
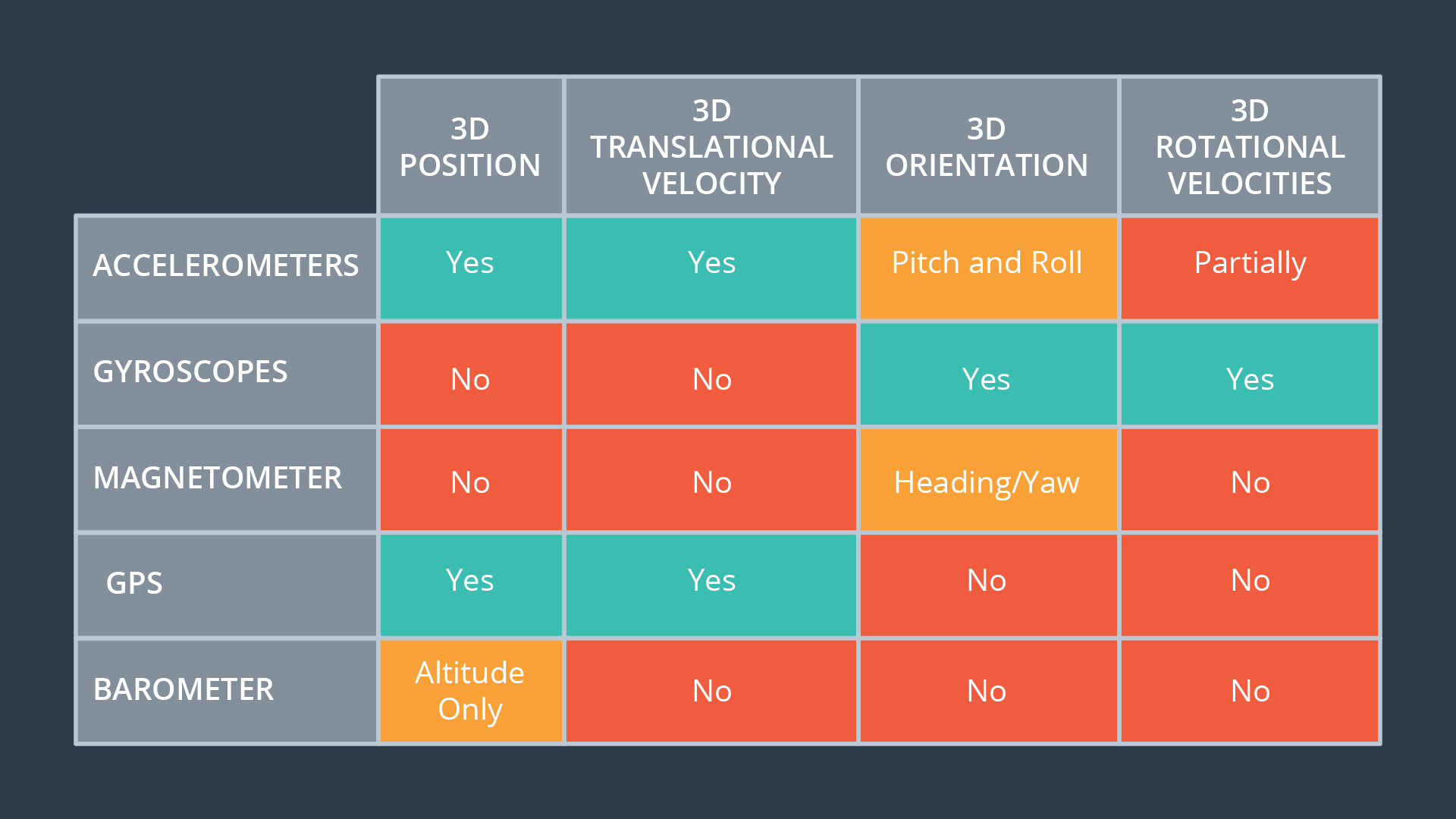
Take a look at the table below. This table will be discussed in the next video, but for now think about why it might be useful to have multiple measurements for certain quantities.
One reason is redundancy: if one sensor fails than another sensor is there for backup. But that's not the only reason! It's also important to consider how a sensor is inaccurate! Some sensors are noisy but unbiased. Some are biased but low-noise. Ideally we want our estimate of the vehicle's state to be both unbiased and low-noise and often that means using multiple sensors to measure the same quantity.